⚠️ Lessons Learned: The Hidden Cost of Picking the Wrong MCU
Semiconductor companies often excel in marketing, even for their lower-end 8-bit MCUs, making it challenging for developers to determine which MCU is best suited for motor control. It’s easy to be misled by claims that an MCU can do “everything” when, in reality, it may fall short in real-time control, peripheral performance, or toolchain support.
“I’ve suffered this firsthand—I once picked the STM8 controller for a 5-phase eBike drive system, and it extended the development time 10x. It lacked the peripheral robustness and real-time response needed for motor control. That one choice taught me how critical the MCU decision is.”
👉 Takeaway:
If your application is not extremely cost-sensitive, always go with the most advanced MCU you can afford. The time you save in development, tuning, and debugging far outweighs the minor cost increase of a better chip.
Motor control lies at the intersection of embedded software, power electronics, and control theory. Whether you’re designing a low-cost BLDC fan or a multi-axis robotic arm, the microcontroller or processor you choose is foundational to your success. In this article, we guide you through the most commonly used processors from vendors such as TI, ST, NXP, Infineon, Microchip, and Renesas, and compare their capabilities.
🔷 Texas Instruments (TI)
TI’s C2000™ Real-Time MCU family is an industry favorite for applications ranging from consumer appliances to industrial drives.
Recommended MCUs:
Delfino Series (TMS320F2838x) – For high-end, multi-axis, precision control
Piccolo Series (TMS320F28003x) – A balanced choice for PMSM, BLDC, and ACIM drives
TMS320F2802x / F2806x – Great for compact, cost-optimized applications
Tools & Support:
MotorControl SDK
InstaSPIN™ FOC and InstaSPIN™ Motion libraries
TI MSPM0G1105 — Low-Cost, High-Value
The MSPM0G1105 is part of TI’s new line of Cortex-M0+ MCUs. It’s not designed to compete with C2000 in performance, but it offers great utility in simple motor applications, especially where cost and board space are limited.
Key Specs:
32 MHz ARM Cortex-M0+
64 KB Flash, 16 KB SRAM
12-bit ADC @ 1 MSPS
PWM via general-purpose timers
Ultra-low power consumption
Best For:
Low-cost brushed/BLDC motor control
Simple Hall-based commutation
Battery-powered applications
TI C2000 vs MSPM0G1105 — At a Glance
| Feature | MSPM0G1105 | C2000 Piccolo (F28003x) | C2000 Delfino (F2838x) |
|---|---|---|---|
| Core | ARM Cortex-M0+ | C28x DSP | C28x + Cortex-M4 (dual-core) |
| Clock Speed | 32 MHz | 100–150 MHz | 200–300 MHz |
| FOC Capability | Software-only | Yes (InstaSPIN) | Yes (Multi-axis + InstaSPIN) |
| ADC | 12-bit, 1 MSPS | 12/16-bit, 3.5 MSPS | Multiple high-speed ADCs |
| PWM | Basic via timers | High-res PWM with trip zone | Advanced, multi-axis PWM |
| Use Case | Pumps, toys, fans | Appliances, robotics, HVAC | Robotics, EV, multi-axis motion |
| Price Range | ~$0.39–$0.69 | ~$2.50–$5.00 | ~$6.00–$15.00 |
🔷 STMicroelectronics (ST)
ST’s STM32 family offers broad performance scaling and a rich set of peripherals, ideal for real-time control.
Recommended MCUs:
STM32G4 / F3 – Purpose-built for digital power and motor control
STM32H7 – High-speed, high-precision for advanced applications
STM32F0/F1/F4 – General-purpose with moderate motor capabilities
Tools & Support:
STM32 Motor Control Workbench
X-CUBE-MCSDK
STM32 Motor Control MCU Families Comparison
| Series | Core | Max Freq | Motor Control Features | ADCs | PWM Timers | Target Motor Types | Unique Strengths |
|---|---|---|---|---|---|---|---|
| STM32F0 | Cortex-M0 | 48 MHz | Basic 6-step commutation | Up to 12-bit | Basic Timer | Small BLDC | Low cost, minimal resources |
| STM32F1 | Cortex-M3 | 72 MHz | FOC & 6-step, MC Workbench support | 12-bit, DMA | 4 (advanced) | BLDC, PMSM | Cost-effective, legacy support |
| STM32F3 | Cortex-M4 | 72-144 MHz | Advanced FOC (2-shunt, 3-shunt, 1-shunt), built-in op-amps | High-speed 12-bit | Advanced | PMSM, BLDC, ACIM | Precision ADCs, Comparators for control loops |
| STM32F4 | Cortex-M4 | Up to 180 MHz | Dual motor FOC, FOC library support | 12-bit, 2Msps | Advanced | Industrial motors | Performance boost for DSP-heavy control |
| STM32F7 | Cortex-M7 | 216-300 MHz | Dual FOC, PFC stage control | Fast ADC | Advanced | High-end PMSM, BLDC | High processing + memory for complex control |
| STM32G4 | Cortex-M4 | Up to 170 MHz | Dual FOC, buck/boost PFC, SMPS control, comparators | 4× 12-bit (up to 4Msps) | Advanced | PMSM, ACIM, Servo, Robotics | High-precision control, rich analog features |
| STM32H7 | Cortex-M7 | Up to 480 MHz | Advanced multi-motor control, AI integration | 16-bit ADC, 3.6Msps | High-resolution | Multi-axis, Servo, Robotics | Flagship MCU, ideal for AI+motor fusion |
| STM32L4 | Cortex-M4 | Up to 120 MHz | Energy-efficient motor control | 12-bit | Basic | BLDC (low power) | Power sensitive applications |
| STM32G0 | Cortex-M0+ | Up to 64 MHz | Entry-level FOC/6-step | 12-bit ADC | Basic Timers | Simple BLDC | Affordable, for basic designs |
Best-in-Class Picks
- Best for Entry-Level FOC: STM32F3 / STM32G4
- Best for Dual-Motor High Performance: STM32H7
- Best for Low Cost BLDC: STM32F0 / STM32G0
- Best for Power-Constrained Design: STM32L4
- Best for AI + Motor Integration: STM32H7 with STM32Cube.AI
🔷 NXP Semiconductors
NXP brings robust tools and signal-processing strength via its Kinetis and i.MX RT families.
Recommended MCUs:
Kinetis KV Series – Cortex-M0+/M4 MCUs with BLDC/PMSM capabilities
i.MX RT1060 – Crossover MCU with high-performance control and rich I/O
MC56F8xxx – Digital Signal Controllers for tightly coupled control loops
Tools & Support:
FreeMASTER, MotorGD, Model-Based Design Toolbox
NXP MCUs for Motor Control – Family Comparison
| Series | Core | Max Freq | Motor Control Features | ADCs | PWM Timers | Target Motor Types | Unique Strengths |
|---|---|---|---|---|---|---|---|
| Kinetis KV1x | Cortex-M0+/M4 | Up to 100 MHz | 6-step & FOC, Hall & encoder support | 12-bit SAR | FlexTimer | BLDC, PMSM | Cost-effective, easy migration path |
| Kinetis KV3x/KV4x | Cortex-M4 | 120–150 MHz | Dual-motor FOC, PFC, Position Estimation | 16-bit ADC, PGA, DAC | Quad FlexTimer | PMSM, ACIM, Servo | Precise analog, higher control loop bandwidth |
| LPC845 | Cortex-M0+ | 30 MHz | Basic 6-step control | 12-bit ADC | SCTimer | Simple BLDC | Low power, ultra-low cost |
| LPC5500 | Cortex-M33 | Up to 150 MHz | Basic to moderate motor control | 12-bit ADC | SCTimer/PWM | BLDC | Secure applications, general-purpose motor use |
| S32K1 | Cortex-M0+/M4 | Up to 112 MHz | Automotive motor control | 12-bit SAR, DMA | FlexTimer | Automotive BLDC, HVAC | AEC-Q100 qualified, CAN, LIN, secure boot |
| S32K3 | Cortex-M7 | 240–300 MHz | Advanced automotive control (e.g., e-Pump, EPS) | Dual 12-bit SAR + SD ADC | eMIOS | PMSM, EPS | Multi-core options, ASIL-D compliance |
| i.MX RT1010/1050/1060 | Cortex-M7 | 500–600 MHz | FOC via SDK, DSP extensions | 12-bit ADC | FlexPWM | High-end PMSM, Robotics | Ultra-fast execution for field-oriented control |
| i.MX RT1170 | Cortex-M7 + Cortex-M4 | 1 GHz (M7) + 400 MHz (M4) | Dual motor control, ML, edge AI | Dual ADC, high-speed | FlexPWM | Dual-axis PMSM, Robotics | ML + Motor combo, edge compute & UI capable |
Best NXP MCU Picks by Use Case
| Use Case | Recommended MCU | Why |
|---|---|---|
| Entry-Level BLDC | LPC845 / KV1x | Simple, low cost, fast startup |
| Industrial PMSM with Precision | KV4x | Rich analog + FlexTimer precision |
| Automotive Control | S32K3 | Safety features + functional safety (ASIL-D) |
| Dual-Motor High Performance | i.MX RT1170 | High MHz + dual cores + ML capable |
| Secure IoT + BLDC | LPC5500 | Secure boot + moderate PWM/ADC |
Motor Control Tools by NXP
- MCUXpresso SDK: Includes motor control libraries (FOC, Sensorless)
- FreeMASTER: Real-time variable tuning and motor visualization
- Motor Control Library Suite: Field-oriented control libraries
- MCAT (Motor Control Application Tuner): GUI-based tuning tool
- Evaluation Kits:
- KV Series Motor Control Tower Kits
- S32K Motor Control Development Platform
- i.MX RT EVKs with motor shields
Key Differentiators of NXP MCUs
- FlexTimer: A very flexible and accurate PWM generation engine
- Precision ADCs + PGA: For accurate phase current sampling
- FreeMASTER: A powerful debug and tuning environment
- Robust Automotive Line: Deep AEC-Q100 portfolio (S32K)
- Cross-domain capability: ML + Control in i.MX RT1170
🔷 Infineon Technologies
Infineon offers both industrial and automotive-grade MCUs with a focus on efficiency and safety.
Recommended MCUs:
XMC1000/4000 – Cortex-M0/M4 with motor timers, ideal for BLDC and steppers
AURIX TC3xx – ASIL-D certified, used in EVs and servo drive systems
Tools & Support:
DAVE™ IDE with motor apps
Motor Control PSoC solutions
Infineon MCU Families for Motor Control – Comparison Table
| Series | Core | Max Freq | Motor Control Features | ADCs | PWM Timers | Target Motor Types | Unique Strengths |
|---|---|---|---|---|---|---|---|
| XMC1000 | Cortex-M0 | 32 MHz | Basic FOC & 6-step, 1-shunt & 3-shunt support | 12-bit | CCU4 | BLDC, PMSM | Entry-level, cost-effective |
| XMC4000 | Cortex-M4 | Up to 144 MHz | Advanced dual motor control, PFC, FOC | 12-bit (fast) | CCU8 (HiRes) | Servo, PMSM, ACIM | Precision timing, industrial-grade |
| AURIX TC3xx | TriCore™ | 300–500 MHz | Advanced automotive motor control, Safety (ASIL-D) | Multiple SAR/DS ADCs | GTM, ATOM, TOM | e-Mobility, EPS, HVAC | Multi-core + safety + real-time capable |
| MOTIX™ TLE987x | ARM Cortex-M3 | 40 MHz | Integrated BLDC driver (3-phase), 6-step | 10-bit | Internal | Automotive BLDC (pumps, fans) | MCU + driver in 1 chip |
| MOTIX™ TLE989x | ARM Cortex-M3 | 40 MHz | LIN, CAN + integrated driver | 10-bit | Internal | Auto BLDC w/ network | Small footprint automotive SoC |
| iMOTION™ IMC100 | Dedicated core | – | Sensorless FOC, field-optimized | On-chip | Integrated | PMSM (appliances, HVAC) | Plug-n-Spin, no firmware needed |
| iMOTION™ IMD110/111 | Cortex-M0 | – | Sensorless FOC, configurable gate drivers | On-chip | Integrated | BLDC/PMSM | Motor + inverter controller in one |
| PSoC™ 6 (ex-Cypress) | Cortex-M4 + M0+ | Up to 150 MHz | Motor control via programmable logic blocks | 12-bit SAR | PWM via UDB | Custom motor drives | Customizable logic, dual-core flexibility |
Best Picks by Application
| Application | Recommended Infineon MCU | Why |
|---|---|---|
| Home Appliances (Sensorless PMSM) | iMOTION IMC100 | Ready-to-spin, fast time-to-market |
| Entry BLDC Fans / Pumps | MOTIX TLE987x | Integrated driver + MCU saves cost and space |
| Industrial AC Motor Control | XMC4000 | Fast timers, FOC libraries, precise analog |
| Automotive HVAC / Pumps | AURIX TC3xx / MOTIX TLE989x | Safety + performance in one |
| Custom, Low-Power Control | PSoC™ 6 | Dual-core + programmable logic for unique control needs |
Infineon Motor Control Ecosystem
- DAVE™ IDE: Eclipse-based IDE with motor control apps and libraries
- Motor Control Workbench: Parameter tuning, code generation for iMOTION
- MCU Boot Kits & Drive Boards: For XMC, AURIX, MOTIX, and iMOTION
- FOC & 6-Step Reference Designs: Available across most MCU families
- Embedded Safety: AURIX supports ISO 26262, ASIL-B/D designs
Integrated vs Discrete Strategy
- iMOTION & MOTIX = All-in-one (controller + driver) → for compact, cost-sensitive designs
- XMC & AURIX = Traditional discrete approach → better thermal management, scaling options
What Makes Infineon Stand Out
- Integrated Power + Control: A leader in combining MCUs with power stages
- iMOTION Series: Enables development without writing code!
- AURIX: Dominant in automotive safety + real-time domains
- XMC4000: High-resolution timer units (HiRes PWM) for precise torque ripple control
🔷 Microchip Technology
Microchip’s dsPIC line has long been a go-to for embedded motor applications.
Recommended MCUs:
dsPIC33CH/CK – Real-time control with DSP core
PIC32MK – ARM Cortex-M4 with motor-specific peripherals
Tools & Support:
MPLAB X IDE
Motor Control Library
MPLAB Code Configurator
Microchip MCU Families for Motor Control – Comparison Table
| Series | Core | Max Freq | Motor Control Features | ADCs | PWM Timers | Target Motor Types | Unique Strengths |
|---|---|---|---|---|---|---|---|
| PIC16 | 8-bit | Up to 32 MHz | 6-step control, basic speed control | 10-12 bit | ECCP | Simple BLDC, Brushed DC | Ultra-low cost, low power |
| PIC18 | 8-bit | Up to 64 MHz | Enhanced PWM, current sensing, sensorless | 12-bit | ECCP | BLDC, fans, pumps | Affordable with rich peripherals |
| AVR (e.g. ATmega328PB) | 8-bit | 20 MHz | Basic 6-step BLDC control | 10-bit | TCA, TCB | Brushed, BLDC | Simplicity, Arduino ecosystem |
| dsPIC33CK | 16-bit DSP | Up to 100 MHz | Dual-motor FOC, Resolver interface, Fast PID | 12-bit, 3 Msps | Advanced PWM (up to 16-bit) | PMSM, ACIM, BLDC | DSP core + motor control peripherals |
| dsPIC33EP | 16-bit DSP | 70–100 MHz | Single motor FOC, Space Vector PWM, PFC | 10/12-bit | Motor Control PWM | Industrial BLDC, PMSM | High performance with real-time response |
| PIC32MK | 32-bit M4K | 120 MHz | Dual motor, FOC, DMA, CAN FD | 12-bit, DMA-driven | 8x High Res PWM | Dual motor PMSM, servo | 32-bit real-time + advanced comms |
| SAM D21 | Cortex-M0+ | 48 MHz | Basic BLDC/Brushed, no FPU | 12-bit ADC | TCC Timers | Fans, pumps | Low power + USB & QTouch support |
| SAM E70 / V70 / V71 | Cortex-M7 | Up to 300 MHz | DSP FOC, PFC, resolver interface | 12-bit ADC (high speed) | TCM, TCC | PMSM, multi-axis, industrial | Powerful DSP + Ethernet, CAN FD |
| SAME54 | Cortex-M4F | 120 MHz | Mid-range BLDC, PFC | 12-bit ADC | 6 TCCs | HVAC, eBikes | M4F with rich analog support |
Top Picks by Application
| Application | Recommended MCU | Why |
|---|---|---|
| Basic BLDC (low cost) | PIC16 / PIC18 | Inexpensive, ideal for fans & small appliances |
| Sensorless FOC | dsPIC33CK | DSP + analog integration, fast control loops |
| Industrial Multi-Motor | PIC32MK | Dual motor support, CAN, DMA |
| Energy-Efficient Servo | dsPIC33EP | Sine wave PWM + PFC optimized |
| High-End PMSM + Networking | SAM E70 / V71 | Cortex-M7 + DSP + advanced comms |
| Arduino-friendly rapid dev | AVR ATmega / SAMD21 | Great for fast prototyping, maker tools |
Microchip Motor Control Ecosystem
- MPLAB X IDE: Main development platform
- MPLAB Code Configurator (MCC): Drag-and-drop peripheral setup, motor control libraries included
- MotorBench Development Suite: GUI for motor parameter tuning and FOC setup
- dsPIC Motor Control Library: Includes FOC, PFC, sensorless routines
- Evaluation Boards:
- dsPICDEM MCHV-3 for high-voltage motors
- Low-voltage BLDC development kits for PIC and SAM
Why Choose Microchip?
- Wide range of cores: 8-bit to 32-bit DSP-enhanced
- Dedicated Motor Control PWMs: Fine dead-time and resolution control
- dsPIC family: Combines real-time DSP math with ease of MCU development
- Excellent software tools: MotorBench, MCC, and MPLAB X IDE
- Robust low-cost offerings: PIC16 and PIC18 still dominate low-cost BLDC
🔷 Renesas Electronics
Renesas offers dedicated MCUs for both simple and complex motor control tasks, featuring strong analog performance.
Recommended MCUs:
RX66T / RX72T – High-speed ADCs and PWM for servo control
RA4T1 / RA6T1 – Cortex-M4 MCUs with motor-optimized features
RZ/T Series – MPU-grade real-time control for high-end applications
Tools & Support:
Renesas Motor Workbench
Flexible Software Package (FSP)
Renesas MCUs for Motor Control – Family Comparison Table
| Series | Core | Max Freq | Motor Control Features | ADCs | PWM Timers | Target Motor Types | Unique Strengths |
|---|---|---|---|---|---|---|---|
| RL78/G1F | 16-bit RL78 | 32 MHz | 6-step, sensorless BLDC | 10-bit | Timer RD, PWM | BLDC, Brushed | Ultra-low power, small BLDC |
| RA2L1/RA2E1 | Cortex-M23 | Up to 48 MHz | Basic BLDC, sensorless w/ software lib | 12-bit | GPT/PWM | Brushed, BLDC | Entry-level Arm + security |
| RA4M1/RA4T1 | Cortex-M33 | Up to 100 MHz | Sensorless FOC (Field Oriented Control) | 12-bit | GPT w/ Dead Time | PMSM, BLDC | Mid-range FOC + secure boot |
| RA6T1/RA6T2 | Cortex-M33 | Up to 120 MHz | Dual motor FOC, current reconstruction | 12-bit, 2Msps | GPT + Dead Time + H/W trigger | PMSM, ACIM, BLDC | High-performance + motor-centric peripherals |
| RX13T | RXv1 (32-bit) | 40 MHz | Sensorless FOC + PFC + current detection | 12-bit, 1Msps | GPT + 3-phase PWM | BLDC, PMSM | Motor-focused, real-time accuracy |
| RX24T | RXv2 | 80 MHz | FOC + Dual motor + Resolver support | 12-bit, 2Msps | GPT, MTU | Industrial PMSM, servo | High integration + cost-efficient |
| RX66T | RXv3 | 120 MHz | Dual motor FOC + FPU + fast ADC | 12-bit x 3, 2Msps | Advanced MTU3 | Robotics, PMSM, ACIM | High-res PWM, DSP-class compute |
| RA8D1 (New) | Cortex-M85 | 480 MHz | AI-enabled, ML-enhanced motor control | 12-bit SAR | GPT + PWM | PMSM, BLDC, multi-axis | DSP & ML fusion with motor support |
| RZ/T2M | Cortex-R52 (dual) | 800 MHz | Real-time dual motor FOC, RTOS capable | Dual ADC + Encoder IF | Multi-channel PWM | Servo, Robotics | RTOS, EtherCAT, deterministic control |
Top Renesas MCU Picks by Application
| Application | Recommended MCU | Why |
|---|---|---|
| Ultra Low Power BLDC | RL78/G1F | Cost-effective, minimal power use |
| Entry-Level FOC | RX13T / RA4T1 | Optimized for PMSM, sensorless or sensored |
| Industrial PMSM (1–2 motors) | RX24T / RA6T1 | Dual FOC + Resolver + fast loop times |
| High-Precision Servo Motors | RX66T | High speed + real-time ADCs + FPU |
| RTOS + EtherCAT Motion | RZ/T2M | Cortex-R + Real-time + comms |
| Next-gen AI + Motor Fusion | RA8D1 | Cortex-M85 + DSP + ML potential |
Renesas Motor Control Tools
- Renesas Motor Workbench: Motor parameter tuning, debugging, and current waveform viewing
- Renesas Flexible Software Package (FSP): HAL, middleware, motor libraries
- e² studio IDE: Unified development environment for RX, RA, RL78, RZ
- Reference designs & kits:
- RX13T BLDC Motor Kit
- RA6T1 Motor Control Kit
- RA8D1 AI Motor Fusion Kit (upcoming)
Why Choose Renesas for Motor Control?
- Dedicated Motor Control MCUs (not just general-purpose repurposed)
- High-resolution timers + ADC synchronization
- Rich support for dual-motor, resolver, and PFC
- Low-power to high-end RTOS-ready
- Ecosystem with tuning, visualization, and libraries included
Selecting the right MCU for motor control isn’t just a technical decision—it’s a strategic one. It determines:
How fast can you bring your product to market
How much time do you spend debugging
Whether your system performs consistently under real-world loads
If your application has room in the budget, consider exceeding the minimum specifications. Choose the most capable controller you can afford. The ROI in development speed, tuning ease, and long-term reliability will more than pay for itself.
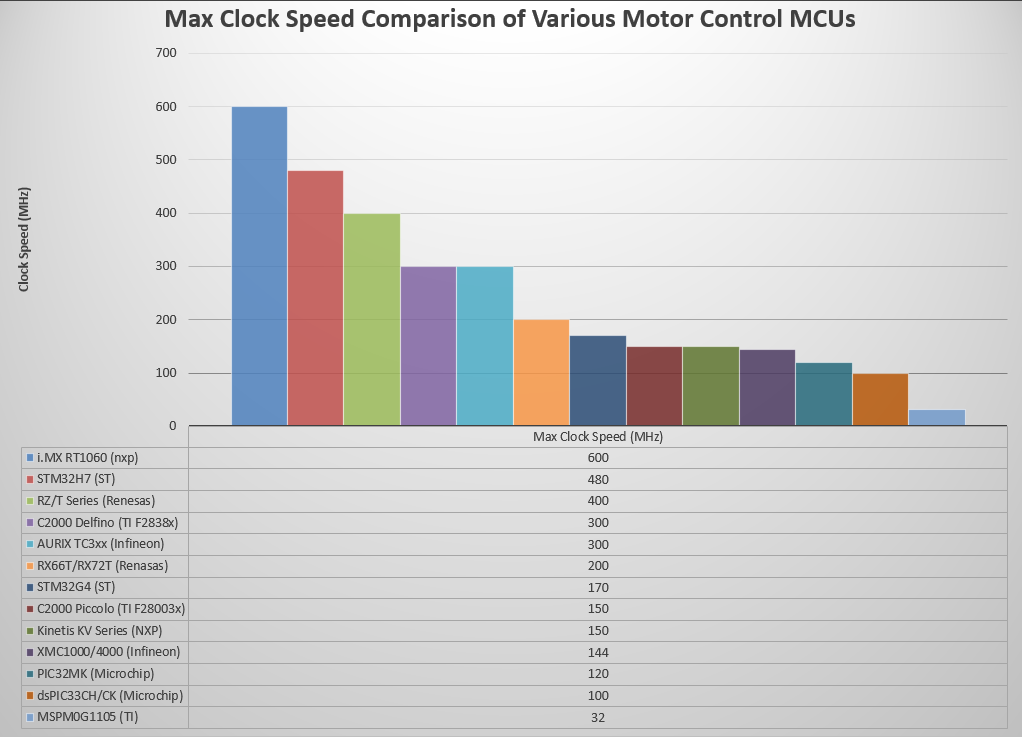
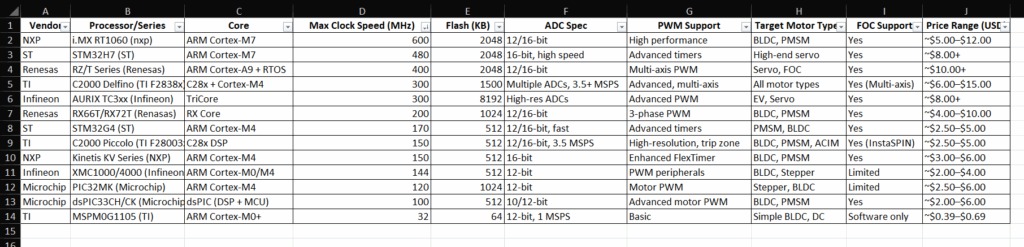
Below is a comparison of the various MCUs, sorted by maximum clock speed.
Compatibility of MCU Families with MATLAB/Simulink and Altair Embed Model-Based Design Tools
| MCU Family | MATLAB/Simulink Support | Altair Embed Support | Notes |
|---|---|---|---|
| TI C2000 (e.g., F28379D, F280049) | ✅ Full support | ✅ Native support | Gold standard for both platforms; real-time control & FOC libraries |
| STM32 (e.g., STM32F4, F7, H7, G4) | ✅ via STM32-MAT/TARGET | ⚠️ Limited support | Simulink auto code gen with STM32 support pkg |
| NXP Kinetis, S32K, i.MX RT | ✅ for select MCUs | ⚠️ S32K family supported | S32K has good integration; i.MX RT may require manual integration |
| Infineon XMC4000 | ✅ via Embedded Coder & DAVE integration | ❌ | MATLAB + DAVE3/4 allows code generation; no Altair Embed link |
| Infineon AURIX | ⚠️ Limited support | ❌ | Some toolboxes exist but not officially integrated |
| Microchip dsPIC33 / PIC32MK | ⚠️ Very limited | ✅ dsPIC fully supported | Altair Embed has strong dsPIC support; Simulink requires manual workflows |
| Renesas RA / RX / RL78 | ❌ | ⚠️ RX and RA experimental support | No official Simulink support; Altair Embed supports RX & some RA series with limited templates |
Summary of Best Choices by Tool
For MATLAB/Simulink Auto Code Gen
| Best MCU Families | Why |
|---|---|
| TI C2000 | Tightest integration, Simulink blocks, real-time support |
| STM32 (via STM32-MAT/TARGET) | Widely used, good examples available |
| NXP S32K | Automotive-friendly, with toolchain support |
For Altair Embed Model-Based Design
| Best MCU Families | Why |
|---|---|
| TI C2000 | Native blocks, no external tool needed |
| Microchip dsPIC33 | Supported via dedicated Altair Embed libraries |
| NXP S32K | Partial support, especially for automotive motor control |
Not Ideal for MBD (Model-Based Design):
- Renesas (especially RA and RX): No Simulink target support and only partial Altair Embed support.
- Infineon AURIX/MOTIX: Minimal integration with either MBD tool.
Need help deciding which MCU or DSP suits your motor control architecture?
Talk to us at PowerElectronicsGroup.com – we’ve been there, made the mistakes, and know what works.
Leave a Reply