What Is Inertia Matching?
Inertia is an object’s resistance to changes in motion (i.e., acceleration or deceleration).
In a motor-drive system, you’re dealing with two key inertias:
- Motor inertia — the rotational inertia of the motor rotor
- Reflected load inertia — the inertia of the load as seen by the motor through the mechanical transmission (gearbox, pulley, etc.)
Jload (reflected)=Jload/Gear Ratio2
Why Match Motor and Load Inertia?
As per the established control principles, if the reflected load inertia is too high compared to the motor’s inertia, the motor may:
- Overshoot when positioning (due to lag in response)
- Oscillate or be unstable
- Require very aggressive tuning of the controller
- Experience reduced accuracy and efficiency
- Struggle with quick reversals (common in robotics or pick-and-place)
Too small a motor (low inertia) will get “pushed around” by the load.
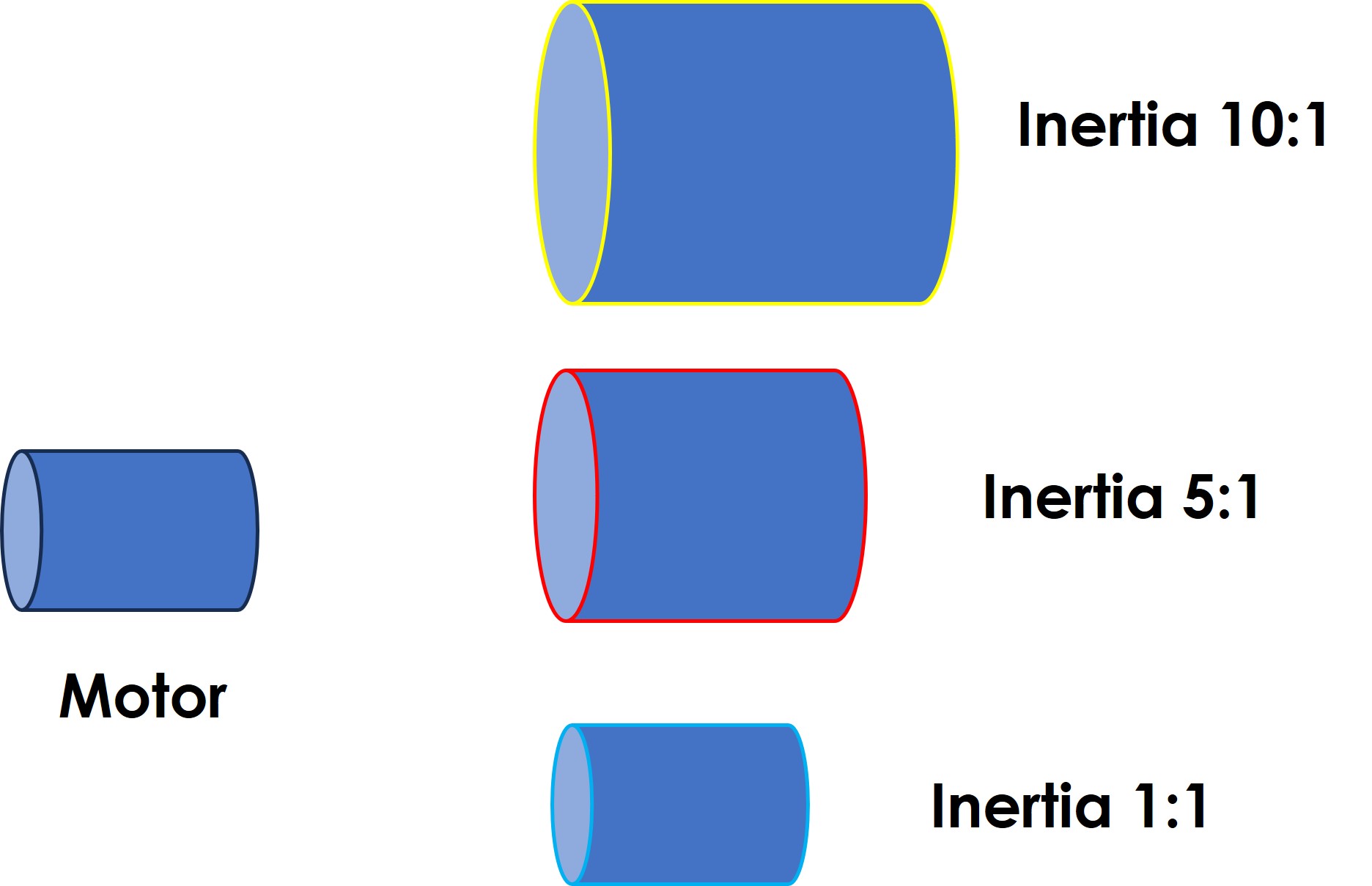
Best Practice (Inertia Ratio Guideline)
For good control, the inertia ratio (reflected load inertia to motor inertia) should typically be: Jload(reflected)/Jmotor ≤ 10:1
- For high-performance servo systems, 1:1 to 3:1 is ideal
- For general applications, up to 10:1 is acceptable
- Beyond that, you may need to increase motor size, add a gear reducer, or tune the control system very carefully
How to Match It?
You can “match” inertia by:
- Choosing a motor with appropriate rotor inertia
- Using a gearbox (gear ratio reduces the load’s reflected inertia)
- Adjusting load design (lighter materials, compact design)
Example
Let’s say you have a load with inertia of 1 kg·m², and a gear ratio of 10:1.
Reflected load inertia becomes: 1/102=0.01 kg.m2
A motor with an inertia of approximately 0.01 kg·m² would be well-matched (1:1 ratio). If no gearbox is used, you would need a much larger motor to match 1 kg·m² directly.
Summary:
Matching motor inertia to reflected load inertia ensures stable, accurate, and efficient motion, avoiding issues like overshoot, vibration, or servo hunting.
Leave a Reply